Printed bistable structures that deploy and reconfigure
Flat-printed assemblies that snap into stable, load-bearing 3D shapes
Deployable structures are valued in aerospace, architecture, and medicine because they ship flat or compact and expand on site. The persistent difficulties are precision and integrity: passive deployment tends to be imprecise, prone to jamming, and to leave a structure that cannot carry load once open. This line of work builds reconfigurable structures from a single multi-material 3D print whose deployed states are geometrically prescribed, mechanically stable, and load-bearing. It develops across three stages: the actuator, its autonomous version, and the inverse-design method that targets arbitrary shapes.
A bistable unit actuator
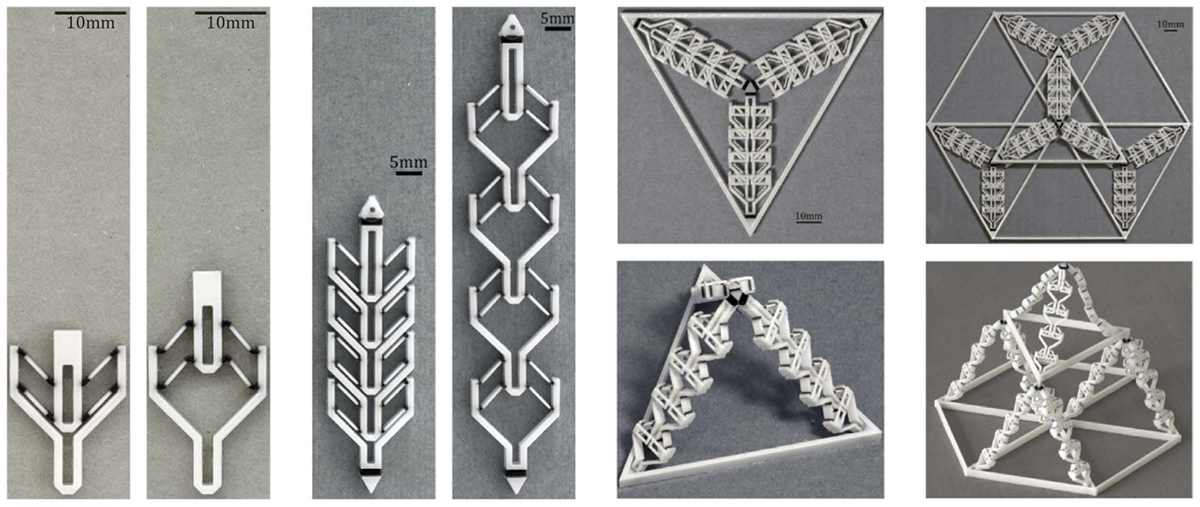
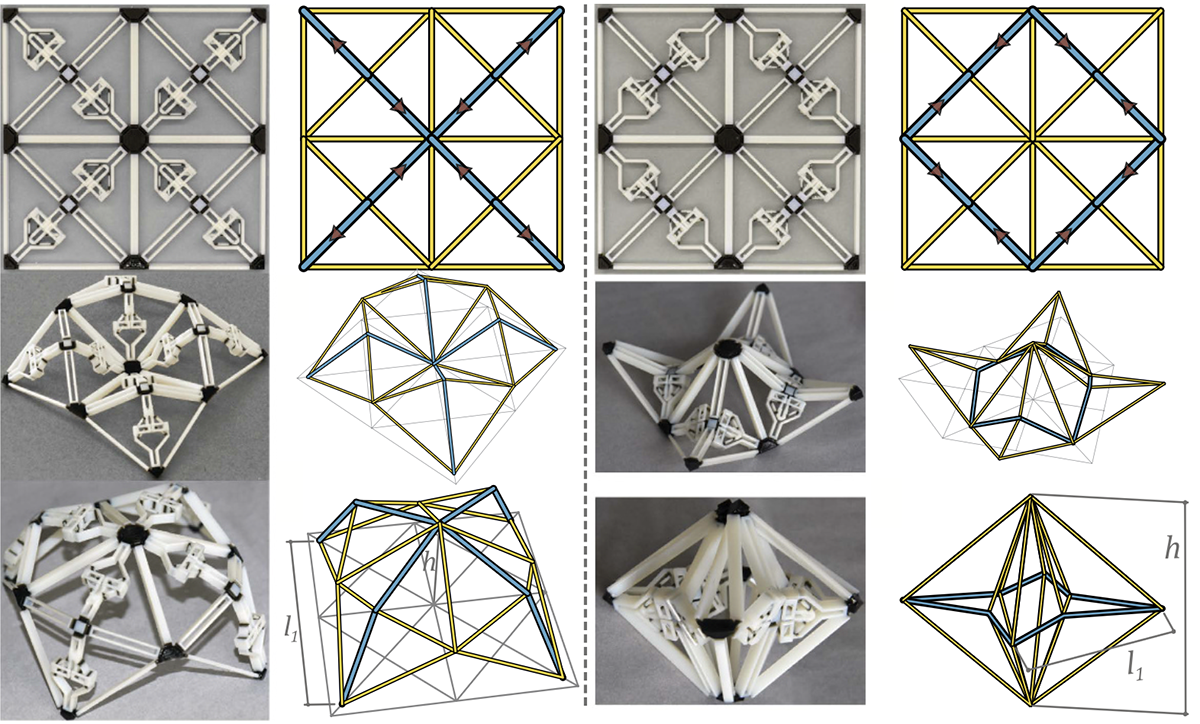
The foundation is a monolithically printed unit actuator based on a Von Mises truss, a shallow two-bar linkage that snaps between two stable equilibria. Both states are stable with no holding force, and the geometry is tuned to maximize stroke, so the expansion ratio approaches unity when actuators are connected in series.
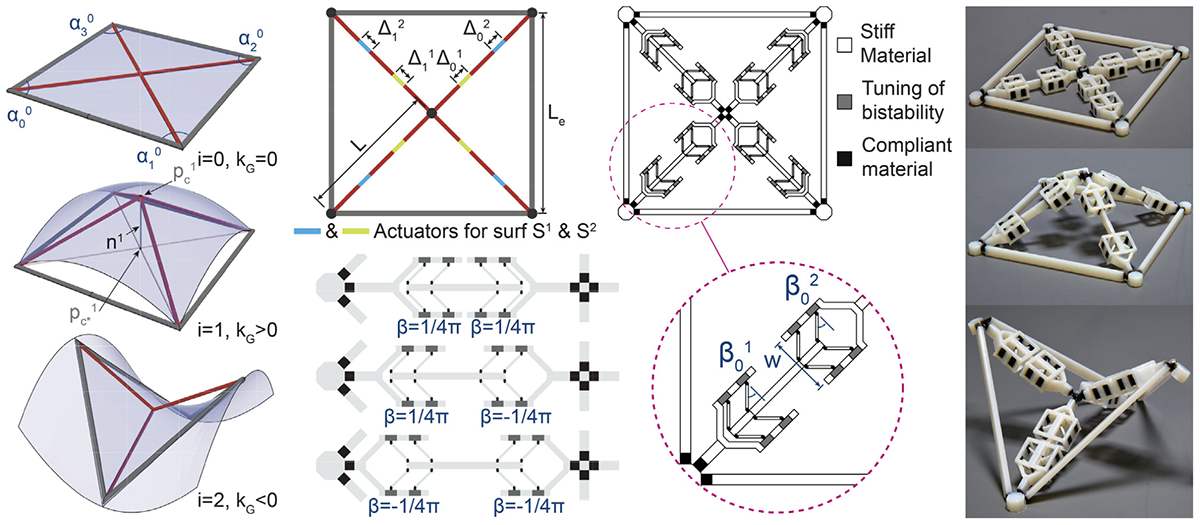
The actuator is a multi-material print combining a stiff structural material, a bistable element, and a compliant hinge. The triggering force is set by the compliant joint's material and length, and we showed it can be tuned over an order of magnitude (roughly 0.5 to 5 N), verified against simulation. The same parameterization also determines whether an assembled sheet activates into positive or negative Gaussian curvature.
Connecting units in series multiplies the stroke, and a modified dynamic-relaxation solver predicts the deployed geometries to within about 5% of measurement.
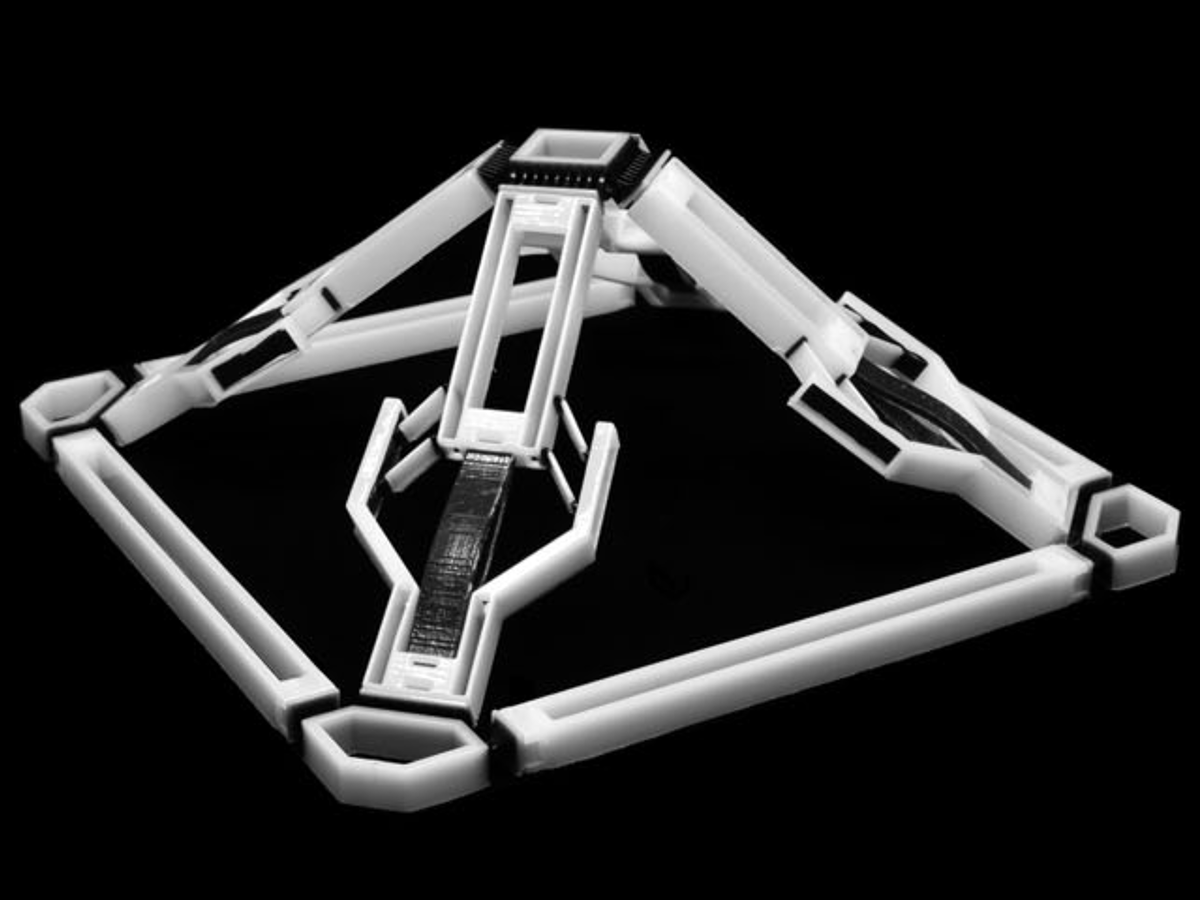
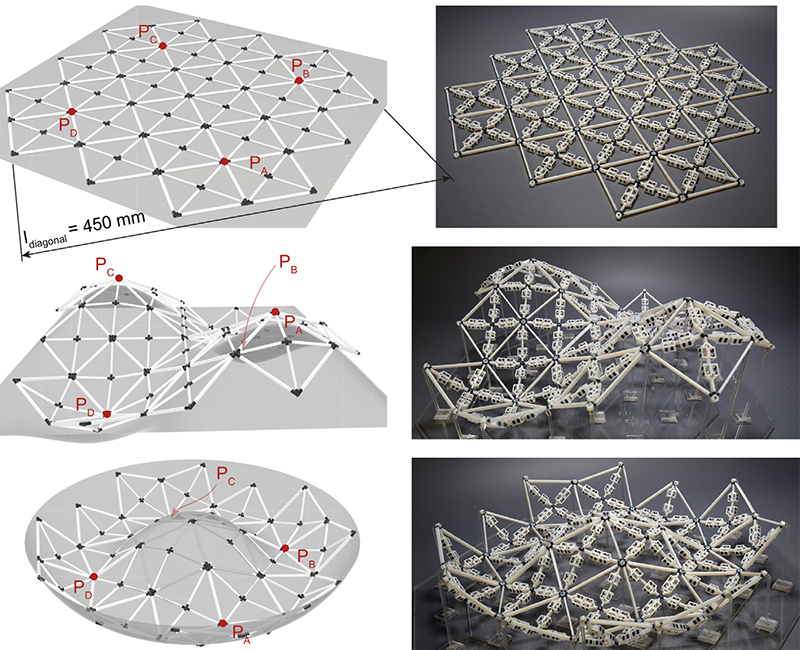
Tiling the cells produces flat precursors that deploy into stable, doubly curved structures, and the approach scales from small modules up to large sheets.
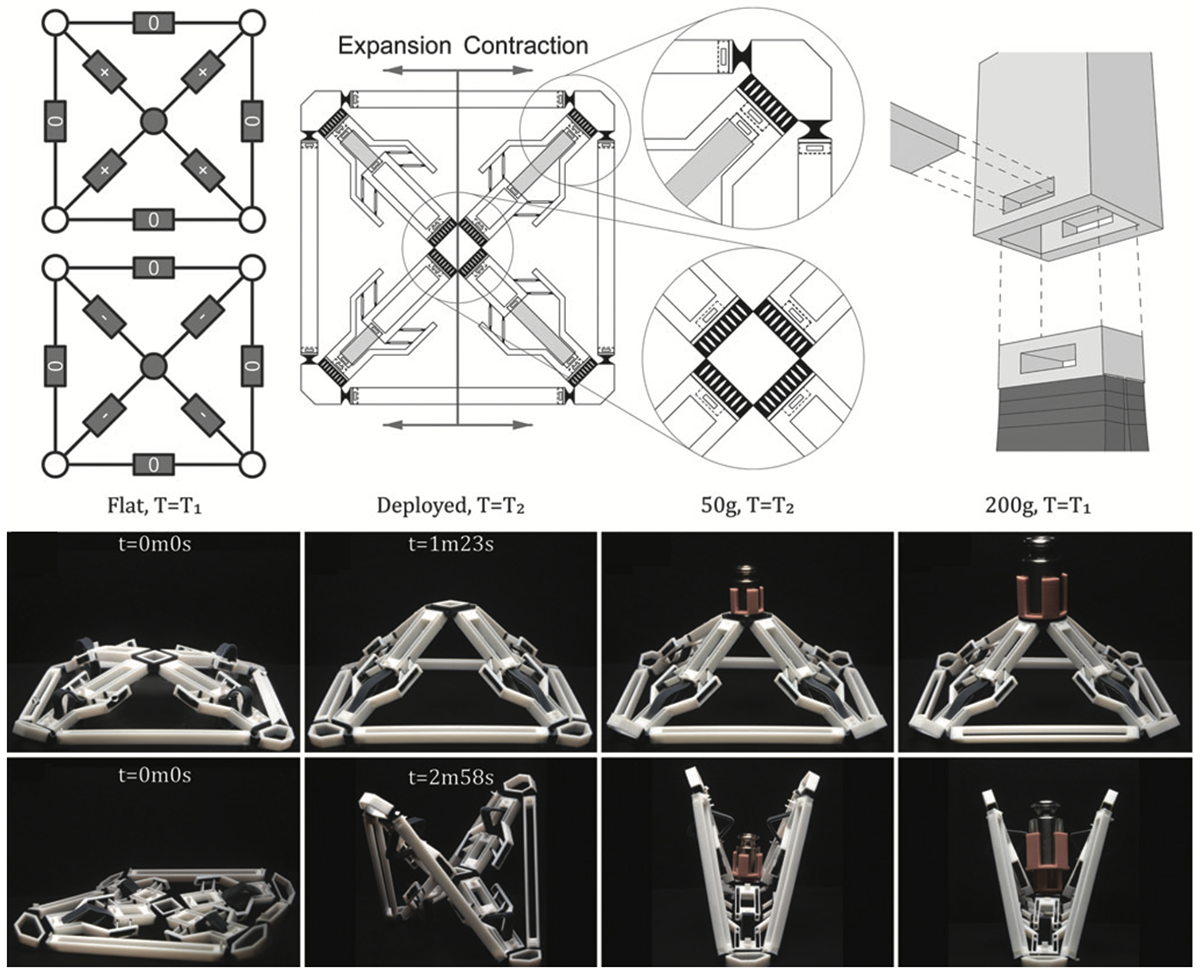
Adding autonomy with shape-memory polymers
The first actuator still requires an external trigger. To make deployment autonomous, we paired the bistable mechanism with a shape-memory polymer: the polymer acts as a temperature-controlled energy source while the bistable element serves as a force amplifier and linear actuator. Above a programmed temperature the polymer recovers and trips the snap, so the structure deploys in response to ambient heat alone, with no motor or external power. Because the recovery temperature can be tuned per actuator, deployment can be sequenced in time, and the deployed structure carries quantified load both during and after activation.
Inverse design of multi-stable surfaces
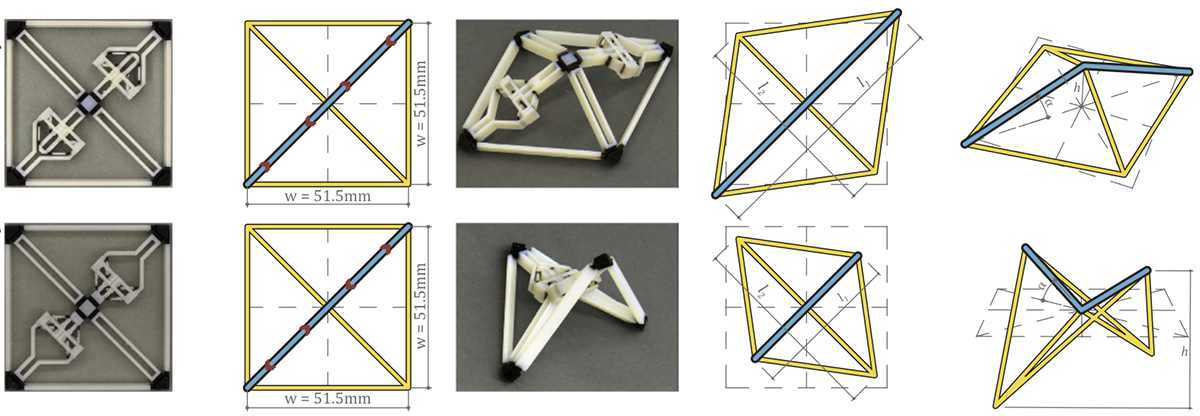
The final stage addresses the design problem directly: given a set of target 3D surfaces, compute one flat sheet that reconfigures into each of them, with every deployed state mechanically stable. We discretize each target as a Chebyshev net, a quadrilateral mesh that captures the surface through the angles of its cells, and map those cells to the planar fabrication sheet.
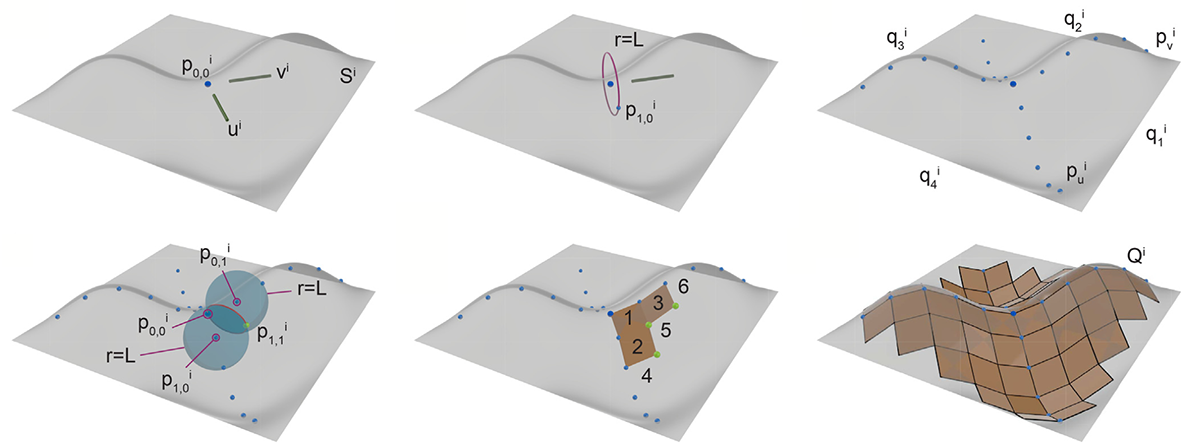
The angular defects between the flat and target states are absorbed by bistable actuators along the diagonals, which lengthen or shorten to realize each shape. Unlike purely geometric inverse methods, this guarantees that the reconfigured states are statically stable rather than merely kinematically possible. We fabricated a single multi-material printed sheet that reconfigures into two distinct, stable, doubly curved surfaces.
Why it matters
Taken together, these results establish a route to reconfigurable structures whose deployment is precise, repeatable, autonomous, and load-bearing, all encoded in a single flat print rather than assembled or externally actuated. The targets span temporary shelters and architectural elements, deployable aerospace structures, and biomedical devices that must change shape after placement. The work was published in Scientific Reports, 3D Printing and Additive Manufacturing, and Materials & Design.
Advised by Kristina Shea at ETH Zurich.
Related publications
- Integrated design and simulation of tunable, multi-state structures fabricated monolithically with multi-material 3D printing. Scientific Reports 7, 45671 (2017). PDF
- An autonomous programmable actuator and shape reconfigurable structures using bistability and shape memory polymers. 3DP+ 5(2), 91–101 (2018). PDF
- Computational design of multi-stable, reconfigurable surfaces. Materials & Design 205, 109688 (2021). PDF