Programmable active lattices
4D-printed cellular solids that reconfigure their own mechanics

The mechanical behavior of a cellular solid is largely fixed by its architecture at the moment it is made. A lattice is light and stiff, or compliant and good at absorbing energy, but rarely both, and it cannot usually switch between those regimes once fabricated. Across two studies we asked whether a single printed structure can reprogram its own mechanics after manufacture, using shape-memory polymers and the geometric freedom of additive manufacturing to encode the reconfiguration into the material and its geometry rather than into motors or controllers.
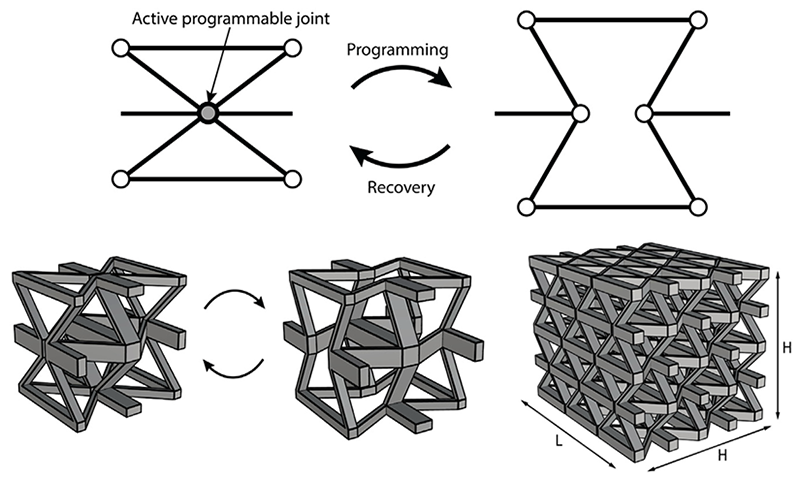
The idea: a joint that rewrites the lattice
The mechanics of a cellular solid is set by its nodal connectivity. Maxwell's counting criterion separates bending-dominated lattices (under-connected, compliant, good energy absorbers) from stretch-dominated ones (sufficiently connected, stiff, efficient load carriers), and most structures are permanently one or the other. Our building block is an active, programmable joint that changes that connectivity on demand: switching a single joint moves the unit cell across the Maxwell threshold, and tiling the cell builds a full three-dimensional lattice whose character can be rewritten after it is made.
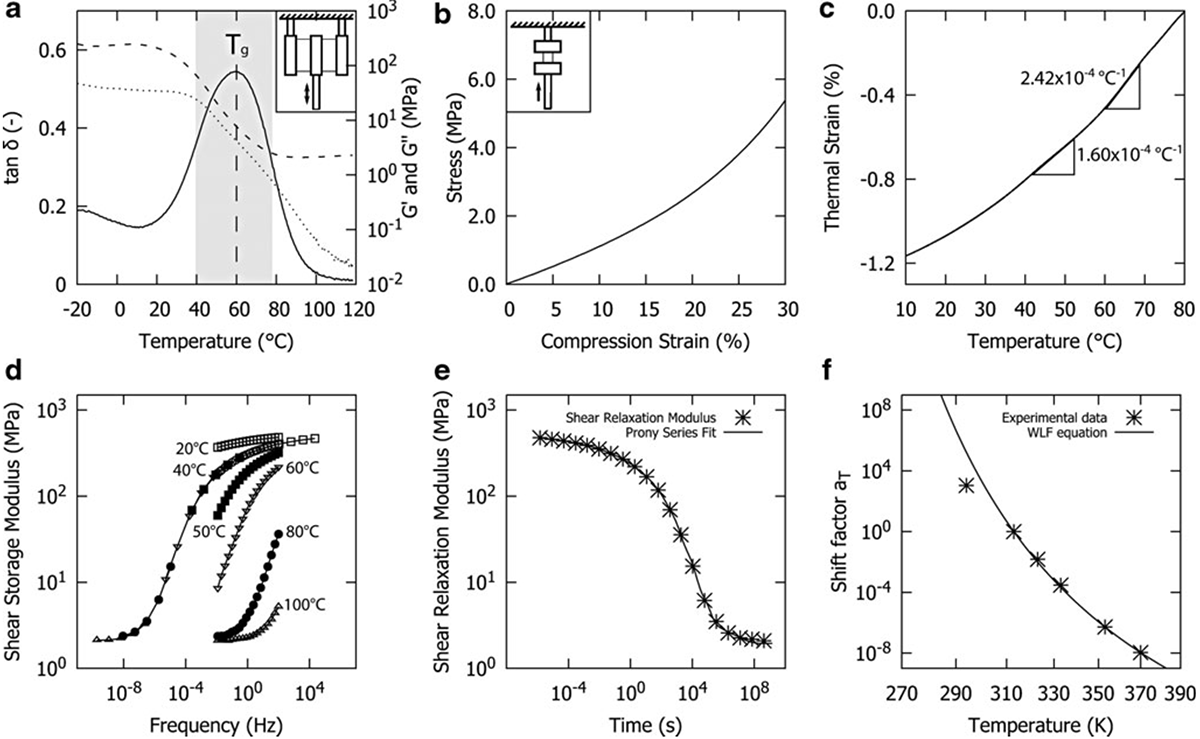
The active material
The mechanism relies on 4D printing: additive manufacturing of stimulus-responsive material, where time is the operative fourth dimension. A printed shape-memory polymer is deformed and fixed below its glass transition, then recovers its programmed geometry when heated above it. To use this as an engineering element we characterized the polymer's thermomechanical response in detail, the temperature-dependent stiffness and loss, the stress relaxation, and the thermal strain, so that the recovery forces and timing could be predicted rather than tuned by trial and error.
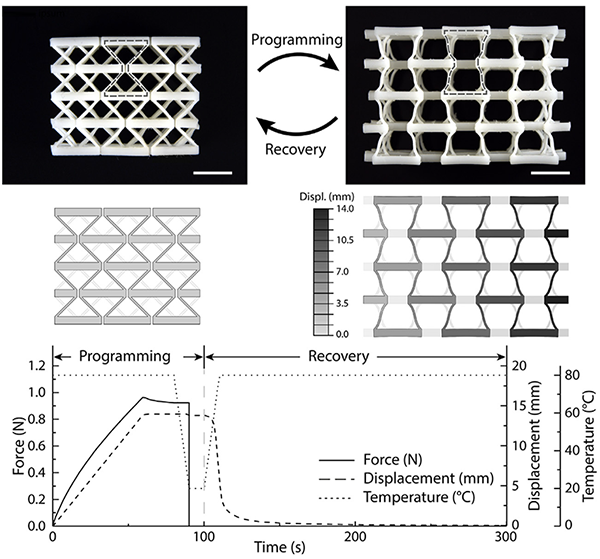
Programming and recovery
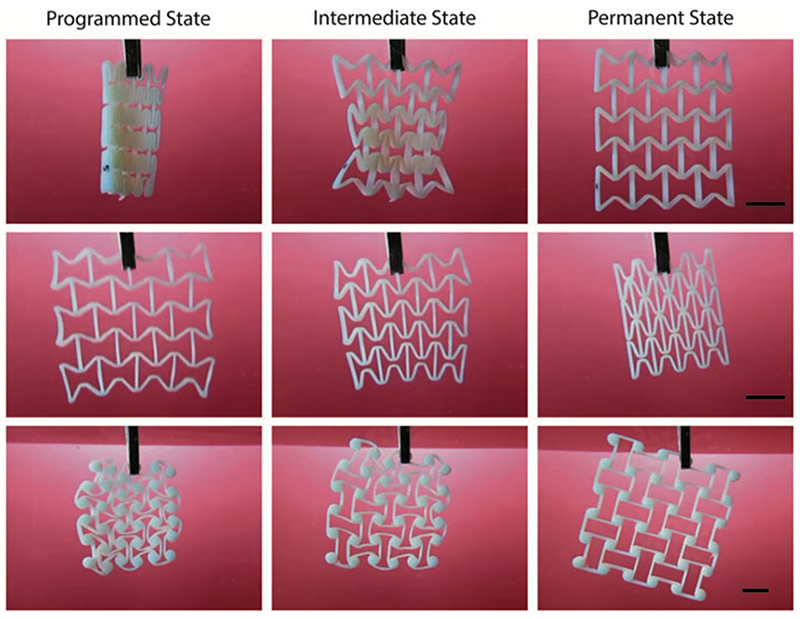
With a calibrated material, a lattice can be deformed into a programmed configuration, held there with no sustained load, and then commanded back by heating. Tracking force, displacement, and temperature through a full cycle shows the two phases clearly: a programming step that stores the deformation, and a thermally triggered recovery that releases it on a controlled schedule.
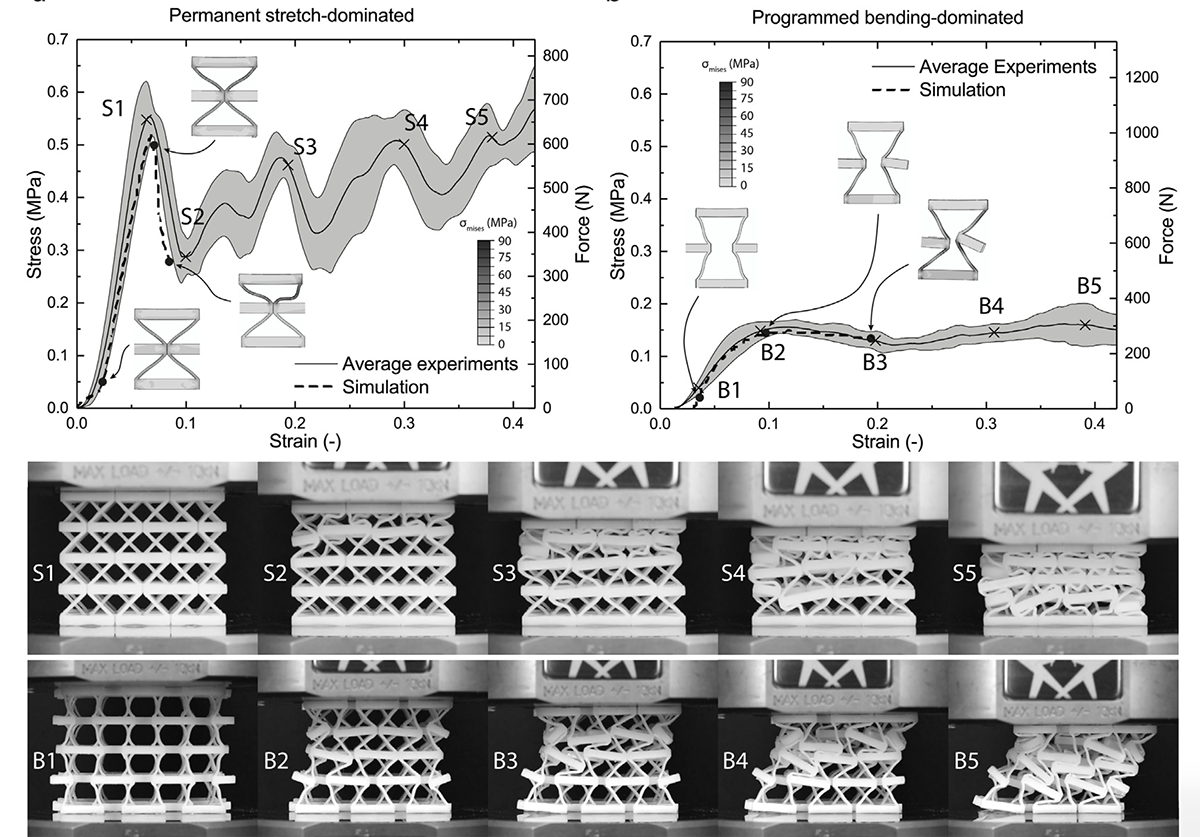
Switching topology, not just shape
The deeper capability is changing the lattice's topology. By placing the active joints so that heating alters the unit cell's connectivity, a single structure can be moved between a bending-dominated and a stretch-dominated lattice. The mechanical consequence is large: in its stretch-dominated state the lattice is stiff and strong, while in its bending-dominated state it is compliant and dissipative. We measured both states across a family of cells and matched them against simulation, confirming that one physical object spans two qualitatively different regimes.
Large-scale shape transformation
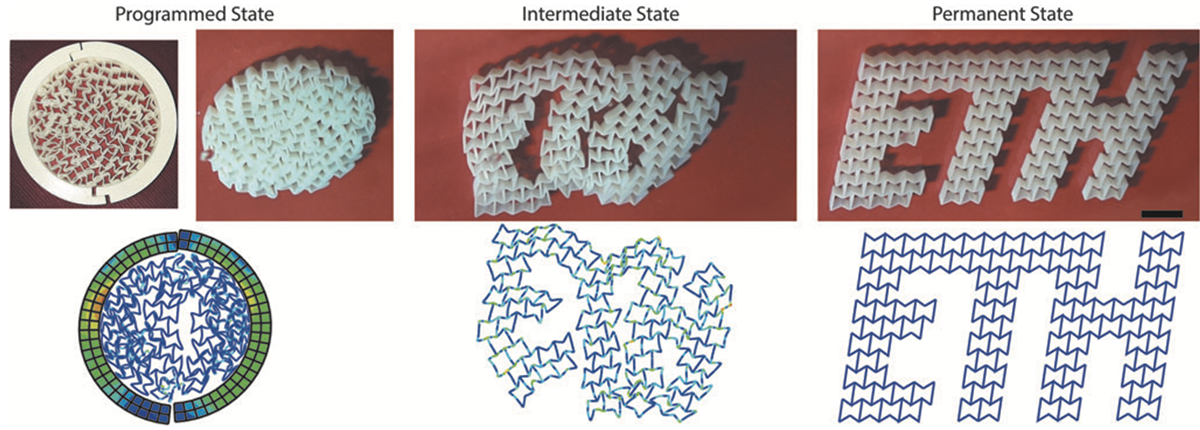
The same active-material strategy also drives dramatic, programmable shape change. A tiled auxetic metamaterial (negative Poisson's ratio, so it expands laterally under tension) can be programmed into an arbitrary intermediate configuration and then recovered, with area changes of up to roughly 200% between the programmed and recovered states. A reduced beam model predicts the forces and deformations of the assembled structure and matches both finite-element simulation and three-point bending experiments closely enough to serve as a design tool.
Composing these cells over a contour lets a flat sheet be programmed to morph into a prescribed target shape on heating. As a demonstration, a patterned sheet reconfigures from a compact programmed state into the letters "ETH," passing through a controlled intermediate before settling into the permanent form.
Why it matters
A structure that can retune its stiffness and energy absorption, or change its shape, in real time is valuable wherever requirements change over a mission rather than staying fixed: a spacecraft component that absorbs energy during launch and then carries load once deployed, or a robotic element that alternates between compliant locomotion and rigid manipulation. By encoding the reconfiguration in geometry and material rather than in motors and controllers, these lattices point toward structures that adapt themselves. The work was published in 3D Printing and Additive Manufacturing and Extreme Mechanics Letters.
A collaboration with Kristina Shea at ETH Zurich.