Temperature-switchable metamaterials
Materials that change how they behave when warmed or cooled
A conventional structural material has a fixed constitutive response: its stiffness, and the sign and magnitude of its deformation under load, are set at the time of manufacture. We set out to design materials whose mechanical response reconfigures with temperature: stiff when cold and compliant when warm, contracting under load at one temperature and expanding at another, with no actuators, power supply, or control electronics. Temperature alone serves as both the stimulus and the trigger.
The mechanism exploits two polymers with sharply different thermal sensitivities in their elastic moduli. Across the operating range, the stiffer phase is roughly 60x stiffer than the soft phase when cold but only about 4x stiffer when warm. Because this contrast collapses with heating, a structure built from both phases is effectively governed by the stiff phase in the cold state and by both phases in the warm state. A single object therefore presents two distinct effective behaviors, selected by its temperature.
Designing the response, not just the geometry
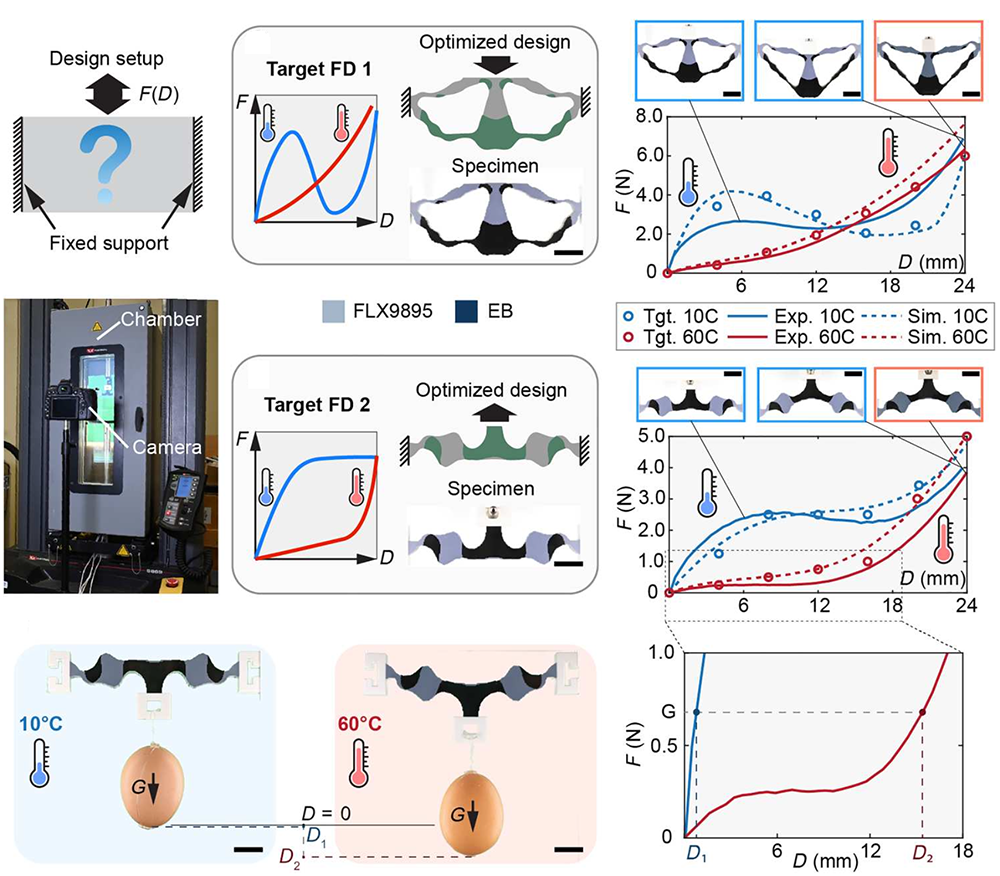
The design problem is inverse: given a target response, find the geometry and the spatial distribution of the two phases that realize it. The combinatorial space is far too large to navigate by intuition, so we pose it as an optimization. We prescribe the desired behavior, for example a specified force-displacement curve in the cold state and a qualitatively different one in the warm state, and a multi-material topology-optimization algorithm searches the two-phase layout that satisfies both objectives simultaneously. The optimized layouts are free-form and non-intuitive, and they are fabricated directly on a multi-material 3D printer that co-deposits the two polymers.
Capabilities
Programmable force response. Components can be designed to buckle compliantly when cold but stiffen sharply when warm, yielding temperature-switchable cushioning relevant to impact absorption and vibration isolation, as the optimized specimens above demonstrate.
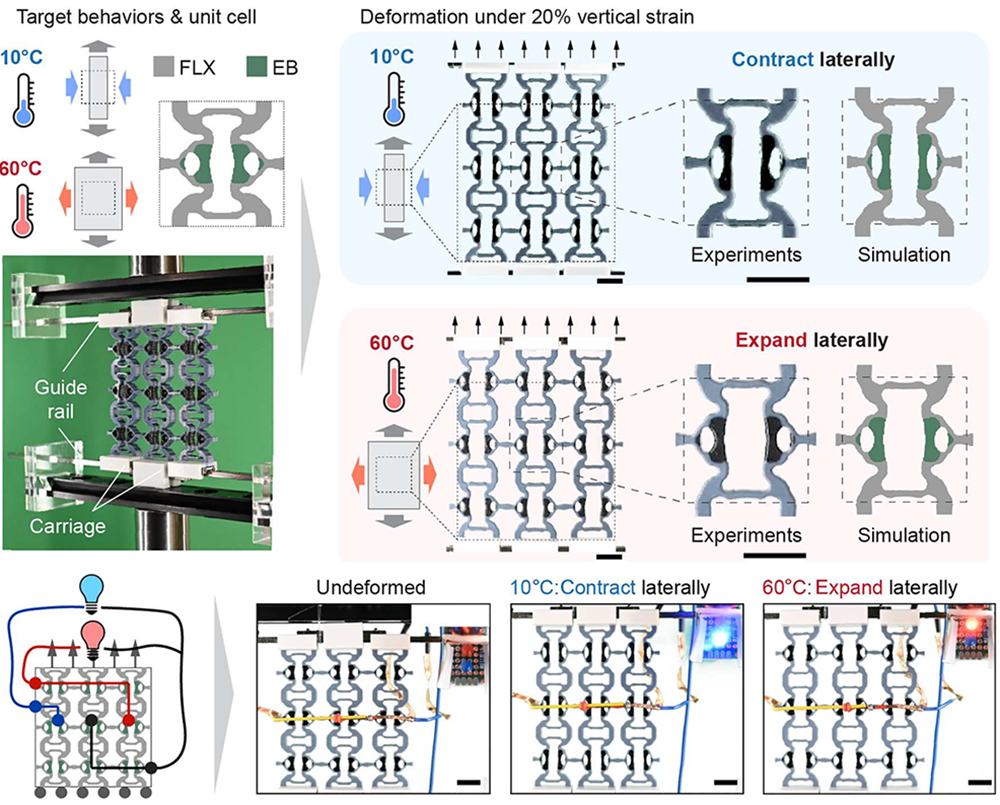
Sign-reversing deformation. The same approach yields a lattice that contracts laterally under vertical load at one temperature and expands at another, flipping the sign of its effective Poisson's ratio with temperature alone.
Three-dimensional response. The principle extends into 3D: a cube can be designed to expand along one axis when cold and along a different axis when warm, with the switch driven purely by temperature.
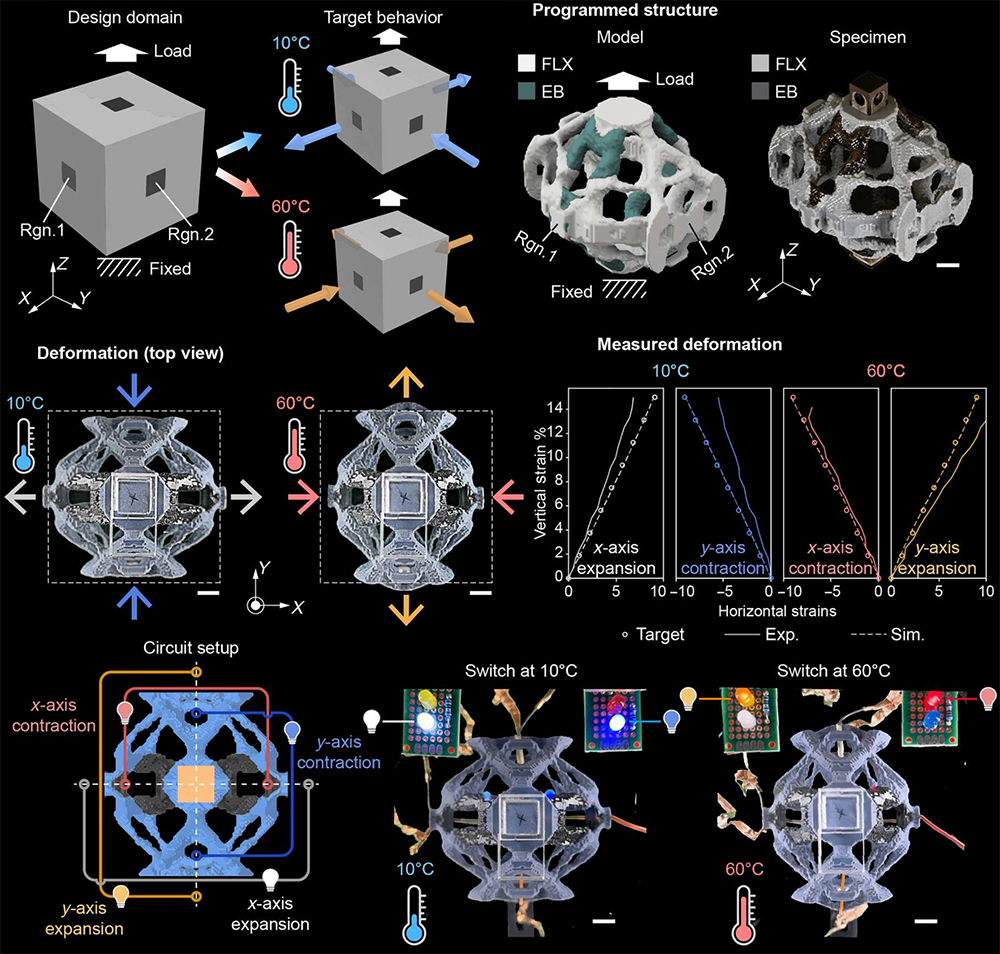
A temperature-triggered switch. Because the actuation stroke is under tight geometric control, warming displaces the structure enough to open or close an electrical contact, a self-actuating thermal switch with no discrete sensor or controller.
Significance
Encoding the response in geometry, rather than relying on shape-memory transitions or external power, makes the material simultaneously its own sensor and its own actuator, with temperature acting as an embedded control signal. The approach points toward soft robots, adaptive cushioning, and devices that reconfigure autonomously as ambient conditions change. The work appeared in Science Advances and was featured on the journal's cover.
A collaboration with Weichen Li and Xiaojia Shelly Zhang (University of Illinois Urbana-Champaign).
Related publications
- Algorithmic encoding of adaptive responses in temperature-sensing multimaterial architectures. Science Advances 9(47), eadk0620 (2023). Cover article. PDF