Untethered soft robots that swim by snapping
Battery-free locomotion powered by bistable snaps
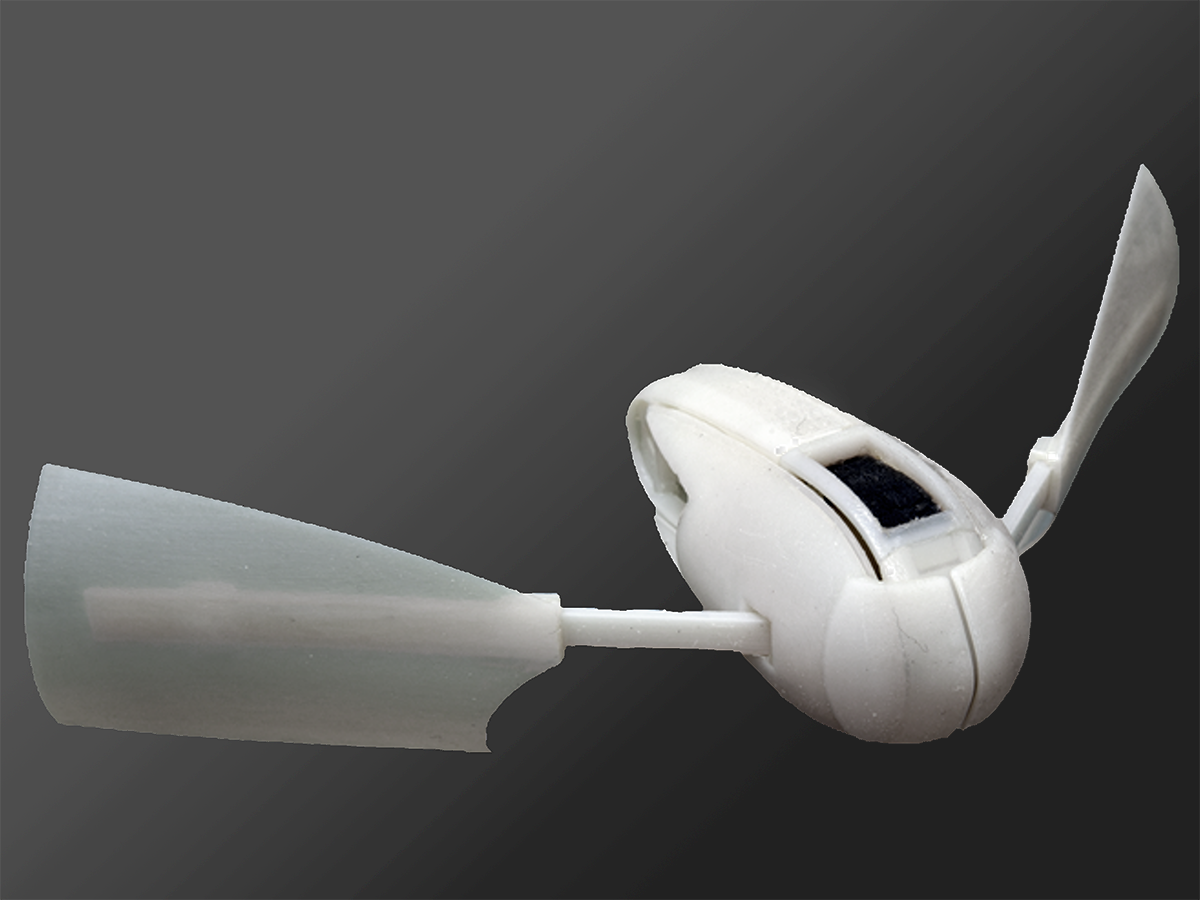
Mobile robots typically depend on a tether or onboard power and control, each of which carries a cost: a tether constrains range and workspace, while batteries and electronics add mass, complexity, and points of failure. We developed small soft swimming robots that locomote with none of these: no battery, no electronics, no tether. Each is produced in a single multi-material 3D print, and each follows a trajectory specified entirely at design time.
Mechanism of propulsion
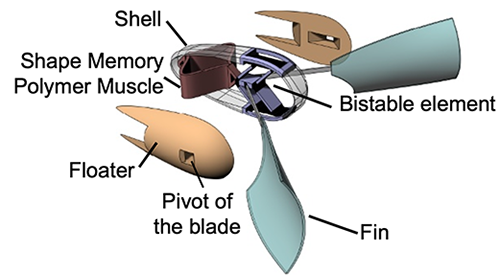
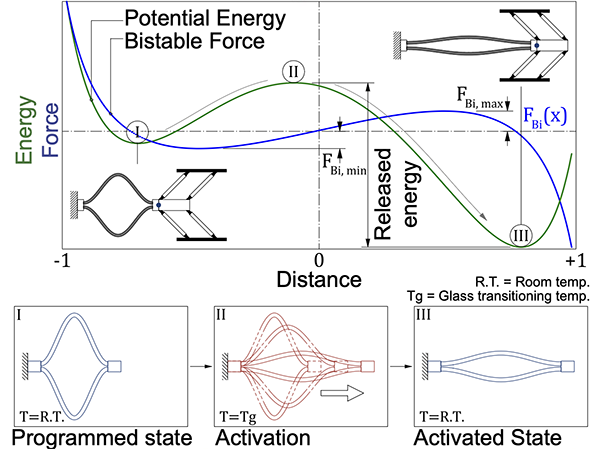
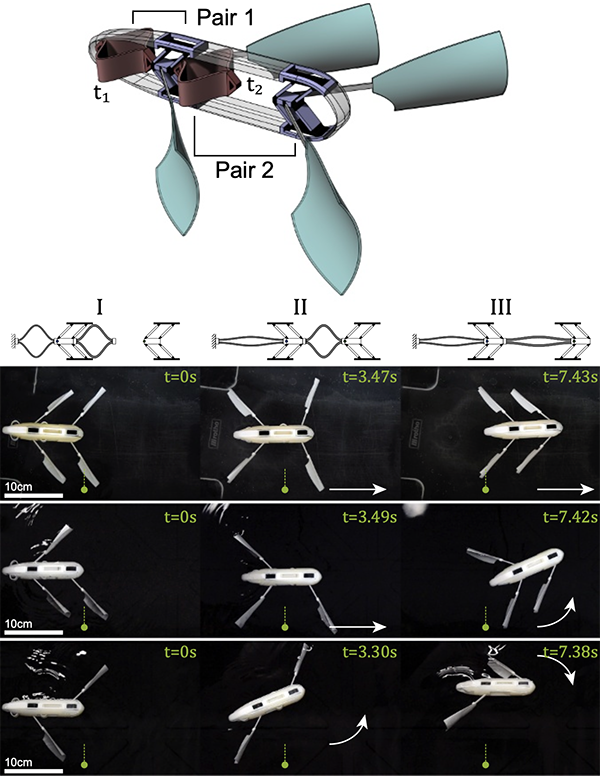
The fins are actuated by a bistable element, a snap-through structure with two stable equilibria separated by an energy barrier. Crossing that barrier releases the stored elastic energy on a timescale far shorter than the loading timescale, producing the rapid, impulsive paddle stroke that drives propulsion.
The snap is triggered by a shape-memory polymer actuator: a printed curved strip programmed with a recovery temperature. When the surrounding water exceeds that threshold, the strip relaxes toward its programmed configuration and loads the bistable element. Shape-memory recovery is intrinsically slow, but using it only to trigger the snap decouples actuation rate from propulsion rate, so a slow thermal stimulus yields a fast mechanical stroke. The energy landscape is engineered to be asymmetric, so the forward transition is far more favorable than the reverse, rectifying the stroke into net directed motion.
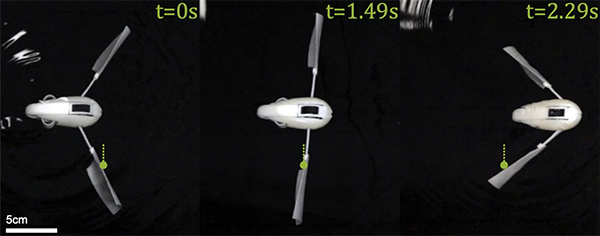
A single muscle-and-element pair already produces directed swimming: as the muscle recovers and the element snaps, the fins sweep through one propulsive stroke and the robot advances.
Programming the trajectory
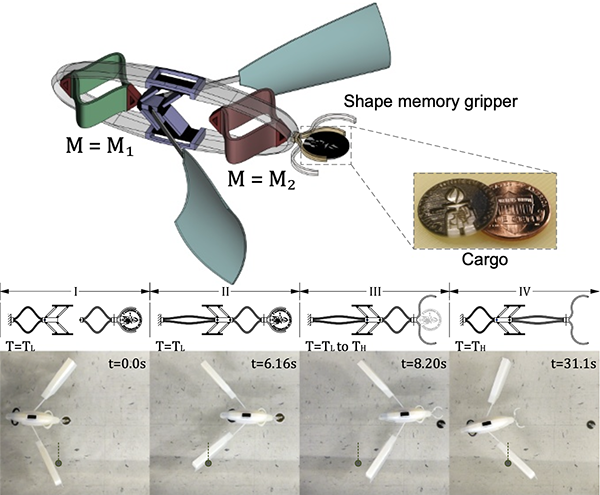
Multiple actuator-element pairs can be tuned to fire in sequence by setting their recovery thresholds: a thinner strip reaches temperature first, followed by a thicker one, yielding a coordinated train of strokes and longer travel. Because heading is governed by fin geometry and placement, the route is encoded in the morphology itself:
- Two symmetric fins produce balanced thrust and straight-line motion.
- Removing or offsetting a fin makes the stroke asymmetric, turning the robot through a predictable angle.
Composing fin layout with actuation timing lets us prescribe an entire path in advance. As a demonstration, we built a vessel that swims out, releases a cargo, and returns to its origin, with no feedback or control system of any kind.
Significance
The result demonstrates that locomotion and rudimentary decision-making can be encoded in a material and its geometry rather than in electronics: here, the structure is the controller. This embodied-control approach suits low-cost, disposable, or otherwise hard-to-power platforms, such as untethered devices for open-water environmental or marine sensing, where an onboard battery and processor are impractical. The work appeared in PNAS.
A collaboration with Chiara Daraio's group at Caltech.
Related publications
- Harnessing bistability for directional propulsion of soft, untethered robots. Proceedings of the National Academy of Sciences 115(22), 5698–5702 (2018). PDF