Engineering knitted wearables
Programmable-stiffness textiles for haptics, modeled and designed by computer

Weft-knitted fabrics are an unusually capable engineering material: a single continuous yarn, interlooped, yields a structure that is stretchable, durable, and conformable, with a mechanical response set as much by stitch architecture as by the fiber itself. We treat the knit as a designable mechanical medium and pursue two complementary goals: building functional knitted devices, exemplified by a haptic sleeve, and developing the computational models needed to predict and design knit behavior from first principles.
Haptiknit: rendering touch from a textile
Touch conveys a remarkable bandwidth of information: a tap, a stroke, or a squeeze can signal attention, comfort, or emotion. Yet most wearable haptic devices recreate these sensations with rigid motors and bulky power electronics, producing hardware that is stiff, cumbersome, and uncomfortable against the skin. Haptiknit takes a different route: a soft, knitted sleeve that renders rich, spatially resolved touch on the forearm while remaining light and comfortable enough for everyday wear.
Programming stiffness into the fabric
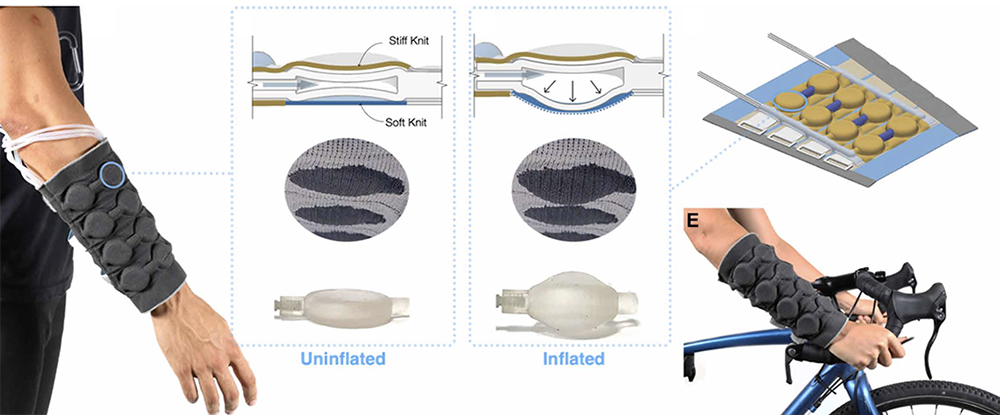
For a wearer to perceive a press, a pneumatic actuator must transmit force into the skin rather than dissipate it by expanding into the compliant fabric around it. The solution is to modulate the local stiffness of the knit so that actuator pressure is directed inward. A computer-controlled industrial knitting machine fabricates the entire sleeve as a single piece, interleaving compliant and stiff regions; the stiff regions serve as a mechanical ground that reacts each actuator's force toward the arm.
Two mechanisms, both intrinsic to the knitting process, set the stiffness:
- Stitch architecture: the loop topology and pattern govern a region's effective elastic modulus.
- Heat-fusible yarn: a thermoplastic filament that fuses when heated, locking a region rigid. Selectively placing it raises local stiffness by up to ~400x relative to the compliant zones.
A single seamless textile therefore spans more than two orders of magnitude in stiffness, a gradient that would be difficult to realize by bonding discrete materials.
Constructing the sleeve
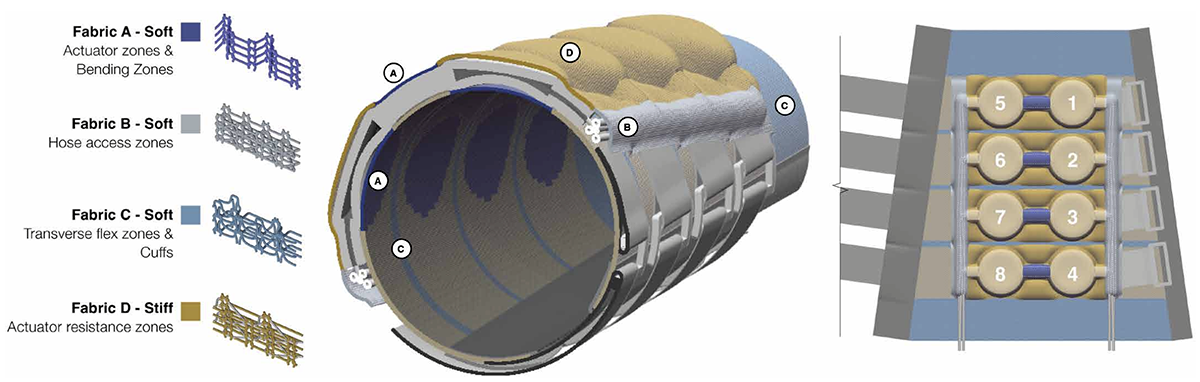
Soft pneumatic actuators are integrated between knit layers; each delivers over 40 N of force and actuates at roughly 14 Hz, fast enough for crisp, well-defined sensations. The sleeve is a single knitted structure of stacked sublayers, with channels and pockets knitted in to seat the actuators and route the pneumatic tubing. Distinct fabric types handle distinct jobs: soft actuator and bending zones, hose-access channels, transverse-flex cuffs, and stiff actuator-resistance zones. It runs from a compact, untethered pneumatic supply worn on the upper arm, requiring neither external power nor a fixed connection.
Evaluating performance
We characterized the sleeve in three human-subject studies:
- Spatial localization: wearers identified the stimulation site on the forearm more accurately than with the eccentric vibration motors common in wearables.
- Apparent motion: sequencing actuators produced smooth, agreeable stroking percepts, tunable along a continuum from discrete taps to continuous motion.
- Affective gestures: the sleeve conveyed emotional cues (attention, gratitude, happiness, calming, love, sadness) about as reliably as a bulkier voice-coil array, using fewer actuators in a far more portable and comfortable form.
Predicting and designing knit mechanics
Devices like Haptiknit expose a broader bottleneck: knit behavior is governed by yarn-scale contact, friction, and loop geometry, so each new fabric has typically demanded its own round of physical testing. We developed a multi-level modeling and design framework to remove that bottleneck. It begins with a volumetric finite-element model that resolves anisotropic yarn behavior and interloop contact at the stitch scale, validated against a systematic set of swatches spanning different stitch lengths, patterns, and yarn materials, so it generalizes without per-fabric recalibration.
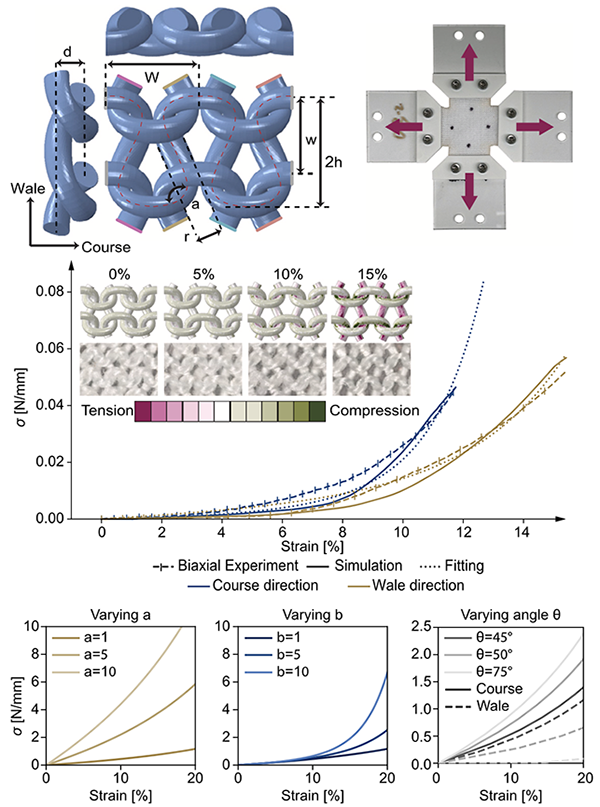
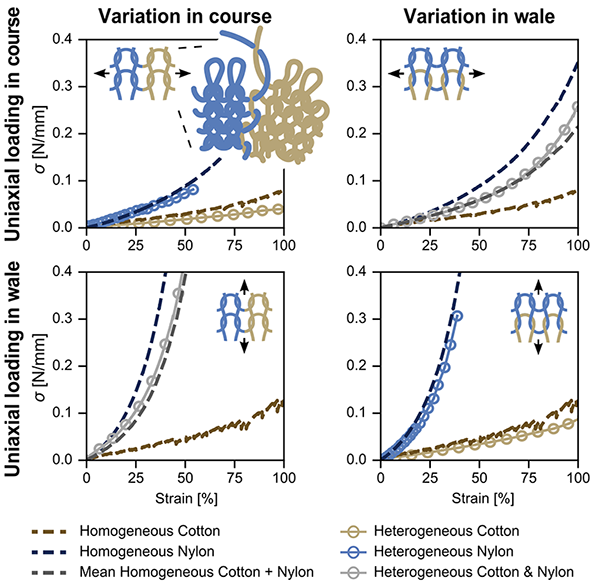
That high-fidelity model is then homogenized into a reduced strain-energy description with only three effective parameters, which predicts fabric-level stress-strain response in minutes rather than hours. Crucially, the framework extends to heterogeneous textiles: transitions between regions of different yarn or pattern are captured with simple series and parallel spring analogies, so a spatially varying fabric can be treated as a patchwork of homogeneous pieces without losing accuracy.
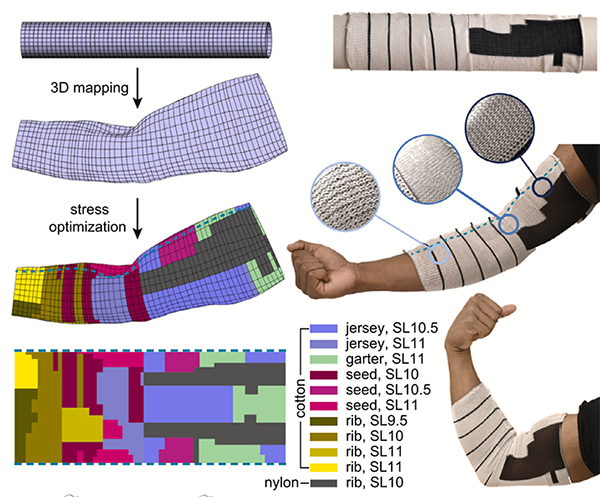
As a demonstration, we used the framework to design a knitted compression sleeve: a 3D scan of the arm is mapped to a flat knit, the stitch pattern is optimized region by region, and the result is fabricated as a single graded garment that delivers spatially uniform pressure across a curved limb.
Significance
Together these results treat the knit as an engineerable mechanical system: the garment can be the mechanism, and its behavior can be predicted and inverted by computation rather than trial and error. Haptiknit shows that encoding stiffness directly into a textile yields accurate, expressive haptic feedback in a form factor indistinguishable from clothing, while the modeling framework provides the design tools to target a specified mechanical response, from haptic feedback to graduated medical compression. Because the devices are produced in a single knitting pass, the same approach generalizes to other body sites and assistive applications without redesigning the manufacturing pipeline.

A collaboration with the Okamura group at Stanford, the Self-Assembly Lab at MIT.