Deployable surfaces, from the benchtop to the wafer
Flat sheets that snap into stable 3D shapes, scaled down to the chip
Can a planar sheet be programmed to deploy into a prescribed, self-supporting 3D surface, with no mold, no supporting frame, and no external power? And if so, how far down in scale does the principle survive? This project answers both questions: it begins with a benchtop, laser-cut demonstration of the idea, then carries the same principle down to the micron scale, where standard wafer fabrication produces free-standing 3D shells.
The starting point: bistable auxetic surfaces
Existing strategies for turning a flat sheet into a curved surface tend to require a sustained applied load (the shape relaxes the moment you let go), permanent plastic deformation, or stimuli-responsive materials triggered by heat or solvent. We instead use a purely mechanical mechanism, tiling the sheet with bistable auxetic cells that combine two properties:
- Auxetic: the cell has a negative Poisson's ratio, expanding biaxially under tension, with the magnitude of areal growth set by its geometry.
- Bistable: it has two stable equilibria separated by an energy barrier, and snaps between them, holding the second state with no applied force.
Prescribing a spatially varying expansion across the sheet introduces an in-plane metric that is incompatible with staying flat. This geometric frustration drives the sheet to buckle out of plane into a determined curved shape, and because each cell latches in its second stable state, the deployed surface supports itself.
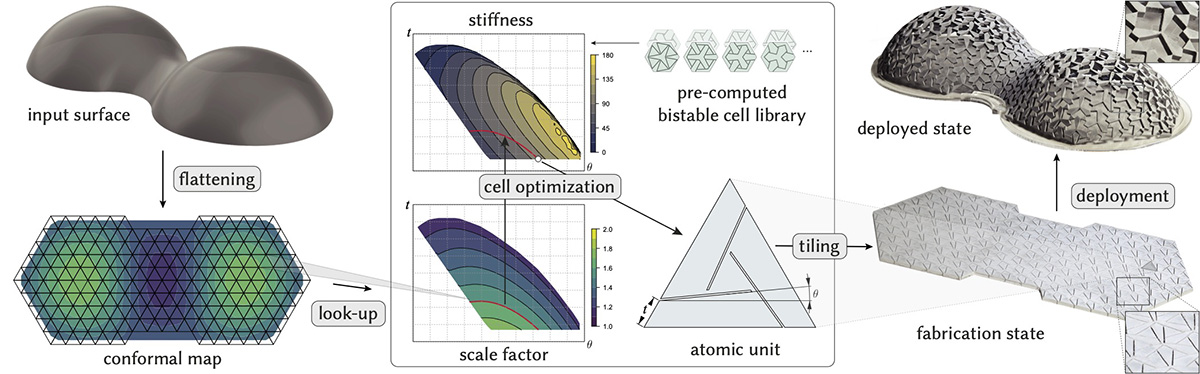
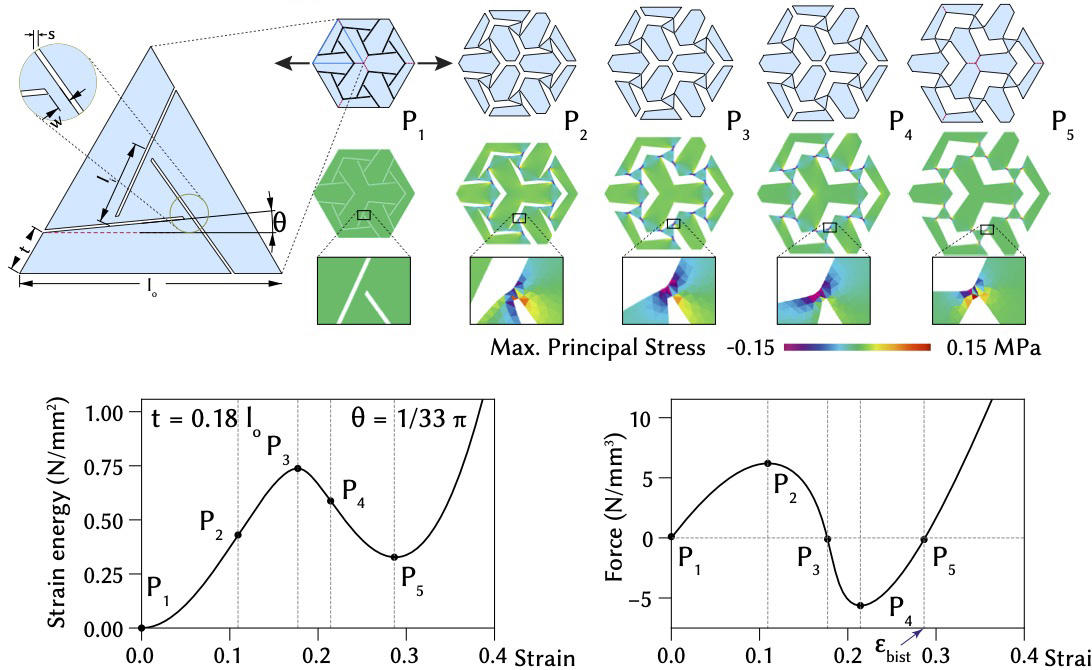
The behavior of a single cell is what makes this work. Each cell is built from six triangular subunits set by a slit length and an opening angle. As the cell expands, the subunits counter-rotate and the compliant hinges store elastic energy, passing through a peak and into a second energy minimum. The force the cell exerts therefore rises, crosses zero, becomes negative (a region of negative stiffness), and crosses zero again at the second stable state. Sweeping the cell geometry produces a library in which any required expansion can be matched by a cell whose second equilibrium sits exactly there, while keeping the deployment stiff and repeatable.
Designing the flat pattern for one specific shape
Targeting a particular surface is an inverse problem. We flatten the target 3D surface to the plane with a conformal map, which gives, at every point, the local areal scaling (the conformal factor) needed to recover the 3D embedding. From the precomputed library we then assign, at each location, the cell whose snapped-open expansion matches the required growth, choosing the stiffest, most repeatable candidate where several qualify. Tiling these spatially graded cells yields a single flat layout whose only compatible deployed state is the intended shape. At benchtop scale that layout is laser-cut from an elastomeric sheet, and we validated the deployed geometries by 3D-scanning physical prototypes against the design.

Scaling it down to the wafer
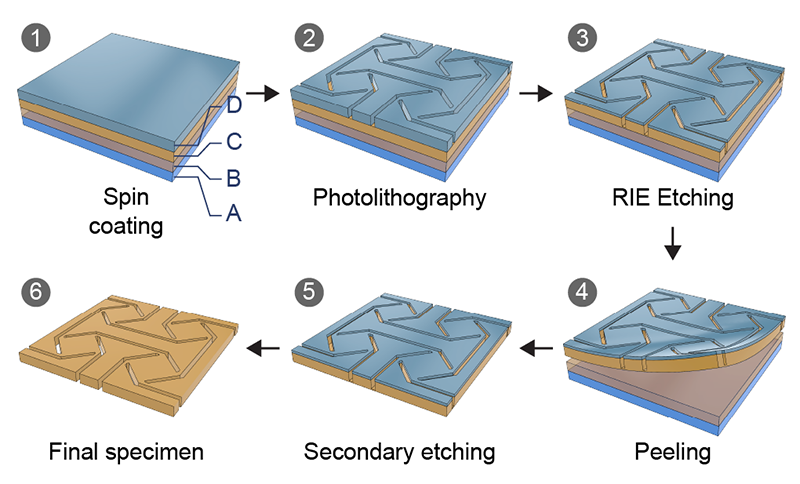
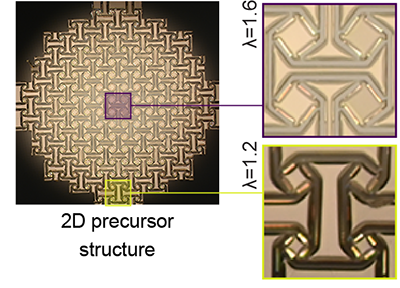
The same principle, carried to the micron scale, lets standard semiconductor processing produce 3D shells. Lithographic fabrication is extraordinarily precise but intrinsically planar, which is a real limitation for curved sensors, conformal antennas, micro-optics, and implants meant for non-developable surfaces. Here the rotating-square unit cells are defined as slits in a thin polyimide film using the same photolithography and etch steps used for flexible electronics. The full sheet is patterned in the cleanroom in roughly two days, and a release step delaminates it from the wafer without damaging the compliant hinges and without aggressive wet chemistry.
A worked example: deploying a dome
A spherical dome is the clearest demonstration of the full pipeline. The target dome is conformally flattened, the scale-factor field is sampled on a grid, and each grid square is assigned the cell whose second equilibrium matches the local expansion, producing the lithography pattern.
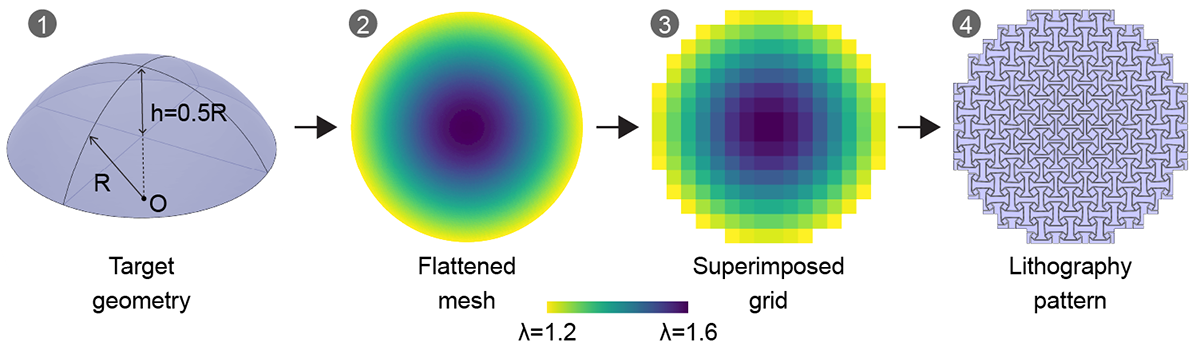
That pattern is then fabricated as a flat, spatially heterogeneous precursor on the wafer, in which cells of differing expansion appear as a visibly varying microstructure.
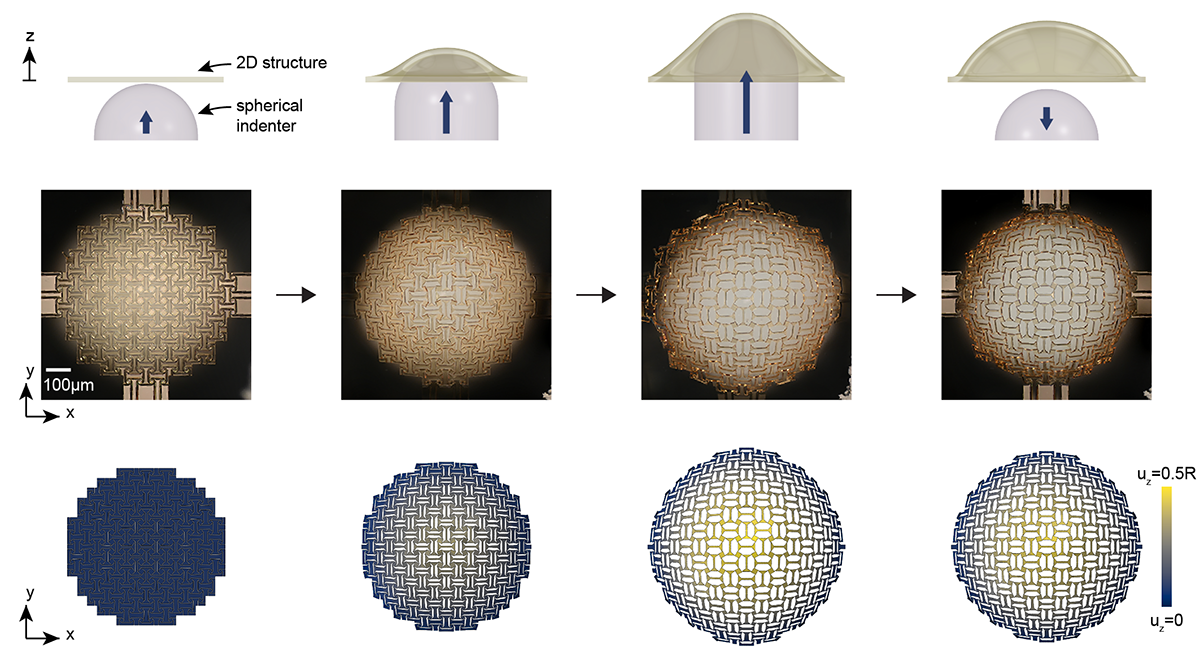
Deployment is the final manufacturing step. A spherical indenter pushes the released precursor past each cell's second equilibrium; when the indenter is withdrawn, the structure stays in its 3D shape, held by the bistability of its cells. Deployment is repeatable across samples and matches finite-element simulation, with the largest geometric deviations confined to the free rim.
Complex shapes
The method is not limited to domes. Supplying different target geometries to the design algorithm yields free-standing structures spanning a range of topologies and both positive (synclastic) and negative (anticlastic) Gaussian curvature, including a model cornea, a double dome joined by a saddle, threefold-symmetric open shapes, and an annulus. In each case the same pipeline (flatten, look up, tile, deploy) is applied unchanged; only the input surface differs.
A working optical device
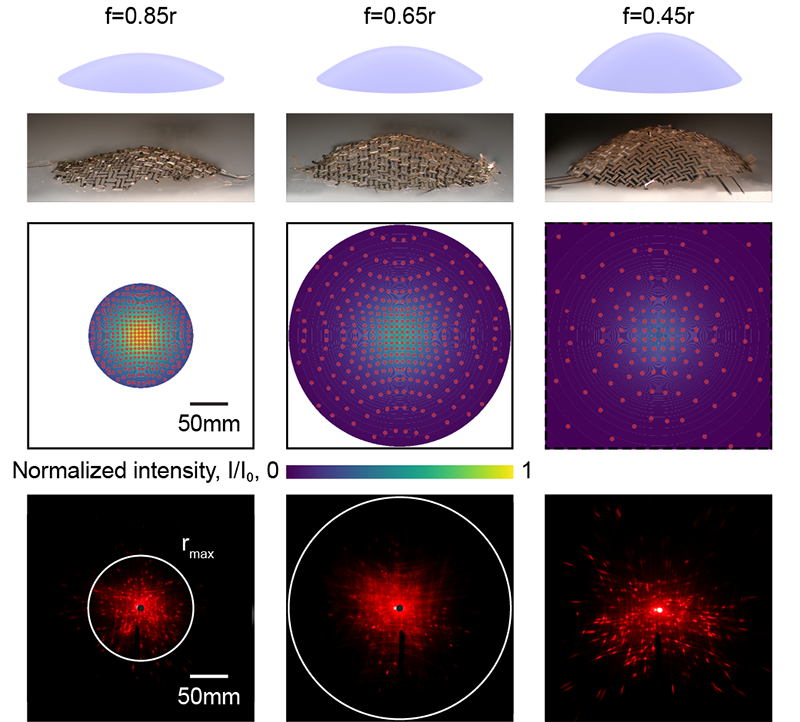
As a functional demonstration, we deploy gold-coated paraboloidal reflectors. Curvature is the whole point of a reflector, so it is a stringent test of how precisely the deployed shape matches the design. We illuminate each reflector with a collimated laser and record the reflected pattern on an imaging plane, comparing it against a ray-based geometric-optics prediction.
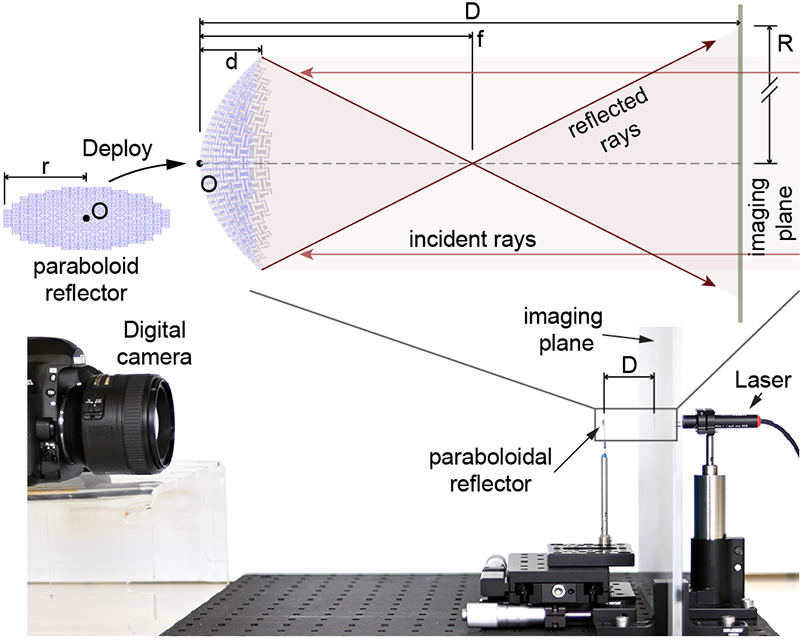
We fabricated reflectors at three focal lengths (f = 0.85r, 0.65r, 0.45r). The measured reflected patterns track the geometric-optics predictions across all three, confirming that the deployed curvature is accurate enough to function as a real optical element, produced entirely by this route.
Why it matters
By recasting shape transformation as a fabrication step, this work extends flexible electronics toward deployable electronics: antennas, conformal sensor arrays, micro-optics, and implants built with the mature, scalable toolchain of the semiconductor industry. Because the design is resolved cell by cell, the planar-to-3D map is known in advance, so functional components such as sensors can be placed at precise locations on the final curved surface.
A collaboration with Julian Panetta (UC Davis), Max Schnaubelt (TUM), and Mark Pauly (EPFL) on the foundational work, and with the Toyota Research Institute of North America on the wafer-scale realization. Supported by NASA MIRO (IDEAS², grant 80NSSC24M0178). Fabricated at the University of Houston Nanofabrication Facility and the Shared Equipment Authority at Rice University.